
|
Меню сайта
|
Проекты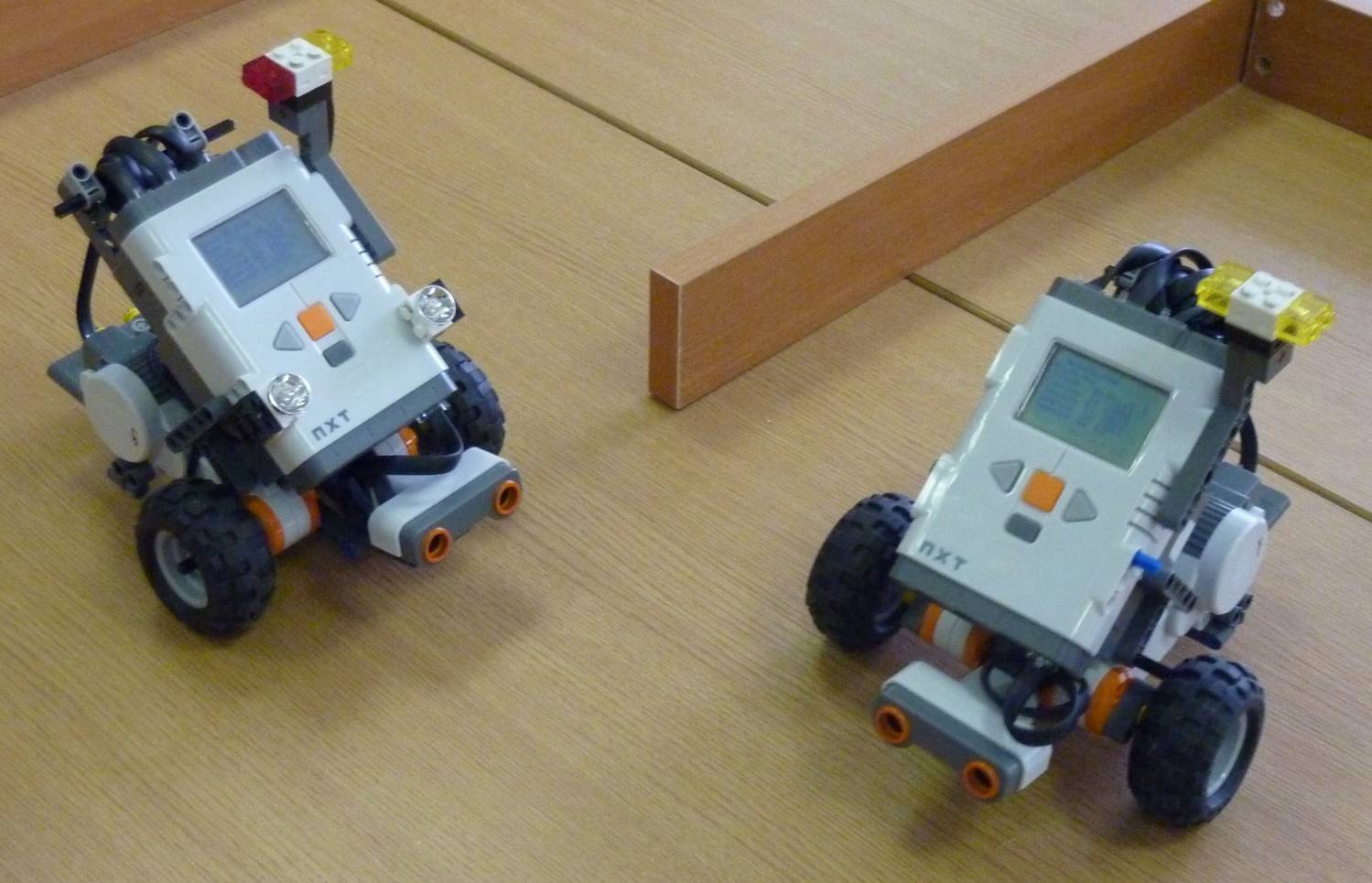 Проект «Лабиринт» подготовлен по теме «Объединение роботов и людей».
Цель проекта – создание робота-спасателя, способного оказывать помощь при проведении спасательных операций в труднодоступных местах. Задача проекта – показать возможность взаимодействия робота и человека на примере спасательной операции по поиску пропавшего туриста в горном лабиринте. Проблема проекта – турист, путешествуя в горном лабиринте, сбивается с маршрута и блуждает в лабиринте, ходит по кругу, не может найти выход. Он подает сигнал бедствия, используя радиомаяк, который входит в комплект его снаряжения. Маяк способен подавать радио- и визуальные сигналы бедствия. На помощь приходит робот-спасатель. Освещая фарами выход из лабиринта, спасатель помогает туристу найти его в темной пещере, а затем выйти из кольца лабиринта. В подобной реальной ситуации на помощь людям приходит команда спасателей, которым бывает сложно отыскать потерявшихся. В труднодоступных местах на помощь людям приходит техника: устройства связи, вертолеты и т.п. Также возможно применять робота. Использование робота снижает степень риска для участников спасательной операции. Проект призван показать такие человеческие качества как взаимовыручка, готовность прийти на помощь в сложной ситуации. Взаимодействие роботов обеспечено сигналами по Bluetooth. Проект подготовлен учеником 5 класса в команде с руководителем. Автором созданы модели роботов, написаны тексты программ, используемых в качестве подпрограмм в итоговой программе управления роботами. Автор занимается робототехникой первый год. Принцип действия: Робот-турист движется по проложенному маршруту лабиринта. Движение контролируется датчиком расстояния. Доходя до стенки, поворачивает налево. Так он попадает в кольцевую комнату через проход в середине стены. Алгоритм его движения не позволяет ему "увидеть" выход, даже проходя мимо него. В результате "турист" вынужден ходить по кругу. Вызов помощи осуществляется передачей сигнала по беспроводной связи Bluetooth и сопровождается визуальным сигналом SOS (вспышки маячков). У входа с лабиринт дежурит робот-спасатель, принимающий сигналы бедствия по Bluetooth. Как только сигнал получен, спасатель быстро отправляется по маршруту туриста и ожидает его появление на входе в кольцевую комнату. Ожидание сопровождается подсветкой выхода. Заметив туриста, спасатель передает ему сигнал по Bluetooth, как команду "следуй за мной" и гасит фары. Робот ожидает сигнал готовности от «туриста». Роботы согласуют свои действия, обменявшись сигналами по Bluetooth, и начинают обратное движение. Спасатель возвращается к началу маршрута, а турист следует за ним. Оба благополучно покидают лабиринт. Технические характеристики: Площадь лабиринта 150х110 см2. Лабиринт выполнен в виде стенок из ДСП. Для демонстрации достаточно сдвинуть два офисных письменных стола. Роботы оснащены датчиками расстояния. Перед началом демонстрации устанавливается связь роботов по Bluetooth. Робот-спасатель оборудован фарами и красным маяком. Робот-турист оборудован желтыми маяками. Программы управления двумя роботами похожи и реализованы в виде блоков (подпрограмм), позволяющих унифицировать разработку программ управления разными роботами. Такая технология написания программы позволяет унифицировать разработку программ управления разными роботами, произвести отладку каждого блока отдельно и собирать программу из отлаженных фрагментов, что упрощает итоговую отладку проекта.
|
Поиск
Категории раздела
Наш опрос
|
|||||||||